Gaussian process action optimization¶
This is basic structure of code itself using toy model. Throughout the M”uller Brown example, we are going to learn
Muller Brown GPAO
Muller Brown GPAO¶
[1]:
import numpy as np
from taps.paths import Paths
from taps.pathfinder import DAO
from taps.model import MullerBrown
from taps.coords import Coords
from taps.visualize import view
from taps.db.data import ImageData
from taps.projectors import Sine
N = 300
Nk = N - 210
x = np.linspace(-0.55822365, 0.6234994, N)
y = np.linspace(1.44172582, 0.02803776, N)
coords = Coords(coords=np.array([x, y]))
model = MullerBrown()
from taps.ml.gaussian import Gaussian
hyperparameters = {'sigma_f': 1, 'sigma_n^f': 1e-8, 'sigma_n^e':1e-6,
'l^2': 0.1}
hyperparameters_bounds = {'sigma_f': (1, 1), 'sigma_n^f': (1e-8, 1e-6), 'sigma_n^e':(1e-6, 1e-4), 'l^2': (1e-4, 4)}
model = Gaussian(real_model=model,
hyperparameters=hyperparameters,
hyperparameters_bounds=hyperparameters_bounds)
imgdata = ImageData("mullerbrown.db")
search_kwargs = {"method":"L-BFGS-B",
"options": {'disp': None,
'maxcor': 20,
'ftol': 2.220446049250313e-4,
'gtol': 1e-03,
'eps': 5e-6,
'maxfun': 1000,
'maxiter': 1000,
'iprint': -1, 'maxls': 100,
'finite_diff_rel_step': 1e-6}}
prj = Sine(N=N, Nk=Nk, init=coords[:, 0].copy(), fin=coords[:, -1].copy())
finder = DAO(Et=-0.45, muE=1., tol=1e-2, gam=1.,
action_name = ['Onsager Machlup', "Energy conservation"],
prj_search=True, sin_search=False,
search_kwargs=search_kwargs,
prj=prj)
paths = Paths(coords=coords, model=model, imgdata=imgdata, finder=finder)
paths.coords.epoch=6
paths.add_data(index=[0, 50, -1])
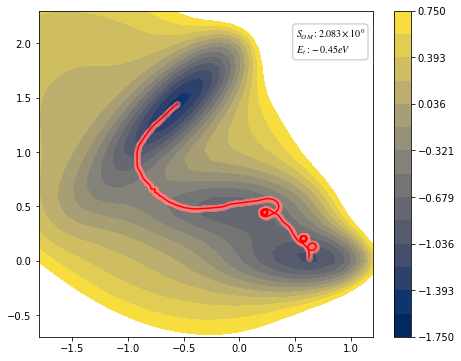
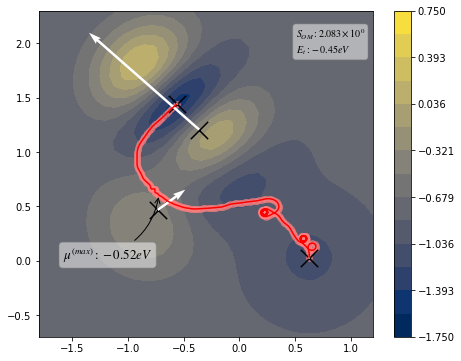
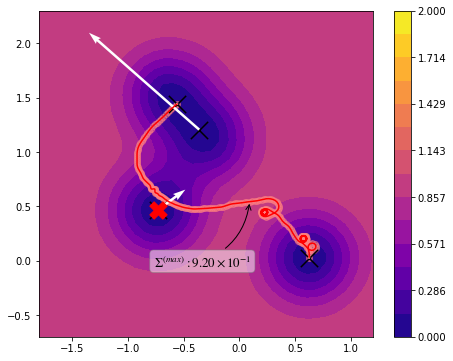
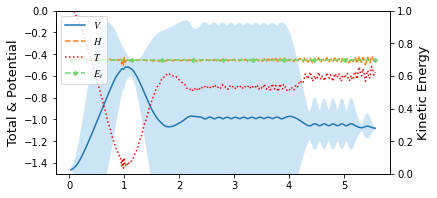
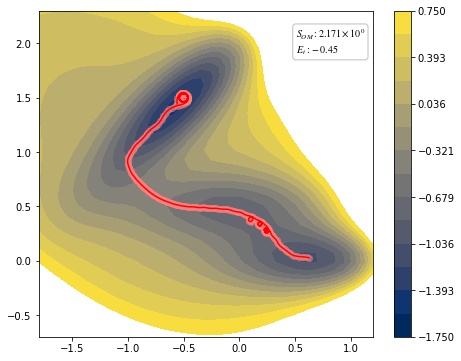
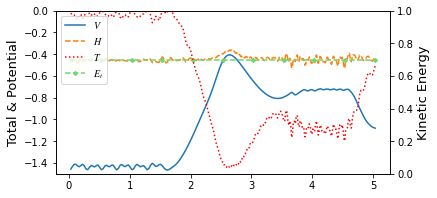
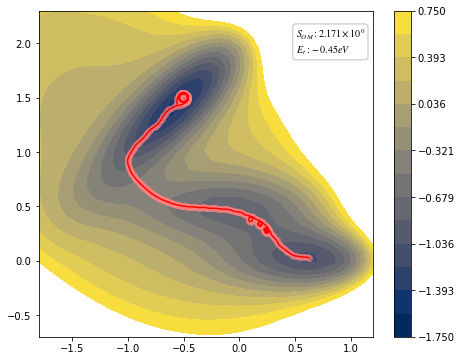
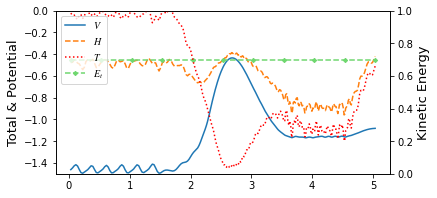
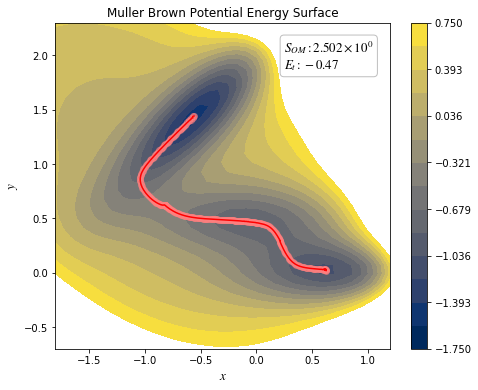
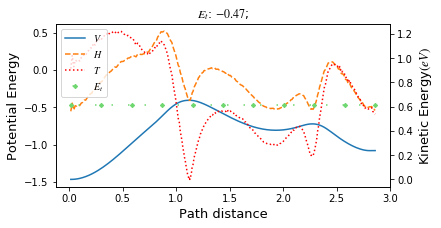
paths.search()
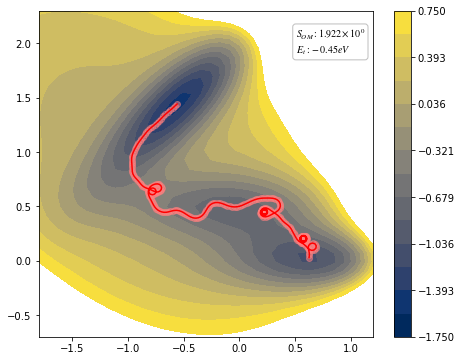
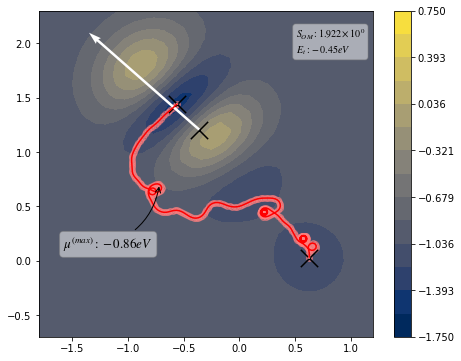
view(paths, viewer='MullerBrown', gaussian=True)
Action name : Onsager Machlup + Energy conservation
Target energy: -0.45
Target type : manual
muE : 1.0
gamma : 1.0
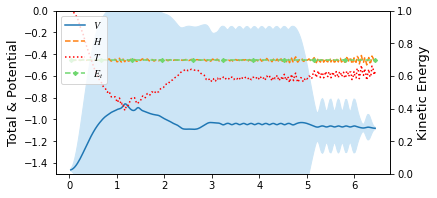
Iter nfev njev S dS_max
converg : 224 238 238 2.3629 0.4154
converg : 226 243 243 2.3621 0.1836
jac_max > tol(0.01); Run without gradient
converg : 227 247 247 2.3618 0.2556
[1]:
<taps.visualize.view at 0x2afcf9d919d0>
[2]:
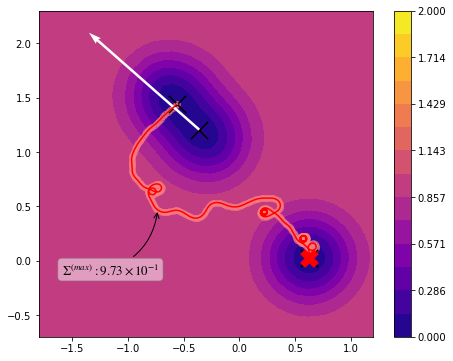
most_uncertain_idx = np.argmax(paths.get_covariance())
[3]:
most_uncertain_idx
[3]:
81
[5]:
paths.add_data(index=[81])
[5]:
{'image': [4]}
[6]:
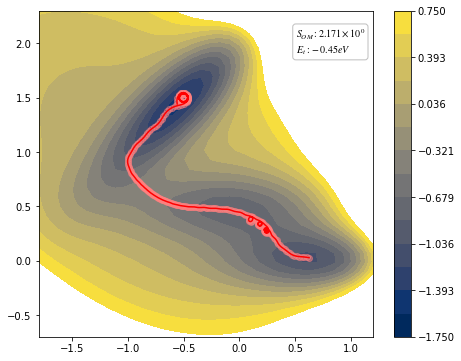
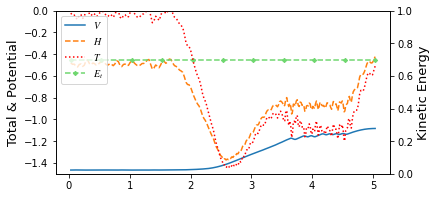
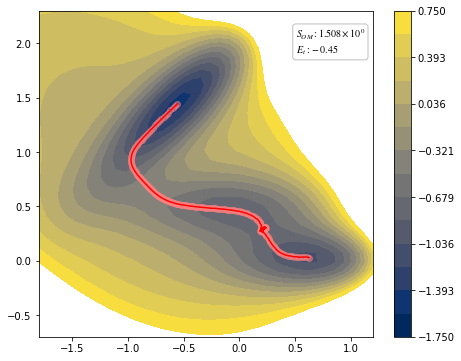
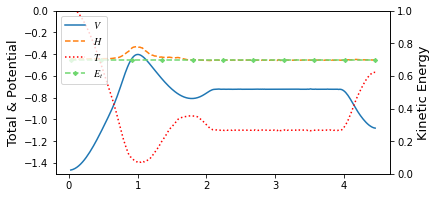
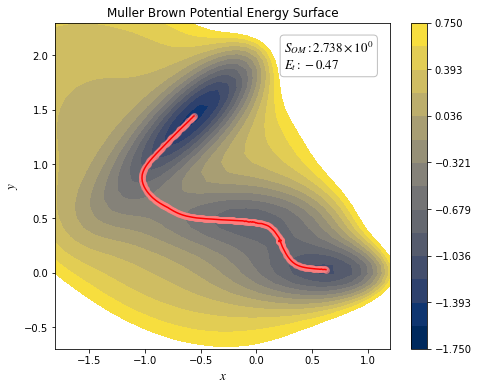
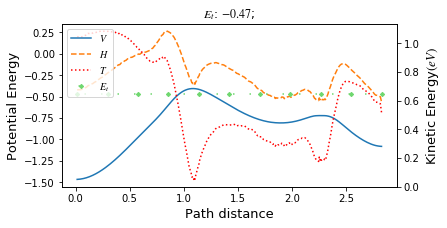
paths.search()
view(paths, viewer='MullerBrown', gaussian=True)
Action name : Onsager Machlup + Energy conservation
Target energy: -0.45
Target type : manual
muE : 1.0
gamma : 1.0
Iter nfev njev S dS_max
converg : 270 294 294 2.5267 1.0437
converg : 272 299 299 2.5255 0.1825
jac_max > tol(0.01); Run without gradient
converg : 273 303 303 2.5251 0.4659
[6]:
<taps.visualize.view at 0x2afcfd7ab1d0>
[3]:
Action name : Onsager Machlup + Energy conservation
Target energy: -0.45
Target type : manual
muE : 1.0
gamma : 1.0
Iter nfev njev S dS_max
converg : 345 358 358 2.9363 0.6397
converg : 347 363 363 2.9345 0.1822
jac_max > tol(0.01); Run without gradient
converg : 348 367 367 2.9341 0.3690
[4]:
view(paths, viewer="MullerBrown")
[4]:
<taps.visualize.view at 0x2ad568538090>
Iteration reduced from 1100 to¶
Only used the 30% of the components.
Database construction¶
[5]:
from taps.db.data import ImageData
imgdata = ImageData("mullerbrown.db")
[6]:
imgdata.add_data(paths, coords=paths.coords[..., [0, -1]])
[6]:
{'image': [1, 2]}
[7]:
imgdata.read_all()["image"][0], imgdata.read_all()["image"][1]
[7]:
((array([-0.55822365, 1.44172582]),
None,
'Finished',
1629603563.4727376,
-1.4669951720995384,
None,
array([ 5.43788282e-08, -2.06867418e-07]),
1629603563.4754255,
None,
None),
(array([0.6234994 , 0.02803776]),
None,
'Finished',
1629603563.475453,
-1.0816672411685238,
None,
array([-2.50191479e-08, 3.64354996e-08]),
1629603563.477985,
None,
None))
Gaussian Potential¶
[8]:
from taps.ml.gaussian import Gaussian
hyperparameters = {'sigma_f': 1, 'sigma_n^f': 1e-8, 'sigma_n^e':1e-6,
'l^2': 0.1}
hyperparameters_bounds = {'sigma_f': (1, 1), 'sigma_n^f': (1e-8, 1e-6), 'sigma_n^e':(1e-6, 1e-4), 'l^2': (1e-4, 4)}
paths.imgdata = imgdata
model = Gaussian(real_model=model,
hyperparameters=hyperparameters,
hyperparameters_bounds=hyperparameters_bounds)
paths.model = model
paths.add_data(index=[0, -1])
[8]:
{'image': [1, 2]}
[9]:
view(paths, viewer="MullerBrown", gaussian=True)
[9]:
<taps.visualize.view at 0x2ad568a8f410>
[12]:
paths.add_data(index=[50, 150])
view(paths, viewer="MullerBrown")
[12]:
<taps.visualize.view at 0x2ad568a433d0>
Pathway optimization perfomed¶
We will going to use direct action optimization. There is some trivial case around it.
[39]:
from taps.pathfinder import DAO
search_kwargs = {"method":"L-BFGS-B",
"options": {'disp': None,
'maxcor': 20,
'ftol': 2.220446049250313e-4,
'gtol': 1e-03,
'eps': 5e-6,
'maxfun': 1000,
'maxiter': 1000,
'iprint': -1, 'maxls': 100,
'finite_diff_rel_step': 1e-6}}
#prj = Sine(N=N, Nk=N-2, init=paths.coords[..., 0].copy(), fin=paths.coords[..., -1].copy())
finder = DAO(Et=-0.45, muE=1., tol=5e-2, gam=1.,
action_name = ['Onsager Machlup', "Energy conservation"],
# prj_search=True, sin_search=False,
search_kwargs=search_kwargs)
#finder = GPAO(real_finder=finder, label= directory + "gpao_1/1", phases=["auto et"])
paths.finder = finder
paths.coords.epoch=6
paths.search()
Action name : Onsager Machlup + Energy conservation
Target energy: -0.45
Target type : manual
muE : 1.0
gamma : 1.0
Iter nfev njev S dS_max
converg : 393 412 412 2.3580 0.2821
converg : 394 417 417 2.3578 0.3512
jac_max > tol(0.05); Run without gradient
converg : 395 422 422 2.3576 0.2191
[40]:
view(paths, viewer='MullerBrown')
[40]:
<taps.visualize.view at 0x2b6b35f18b10>
[ ]:
[ ]:
import numpy as np
from ase.pathway.paths import Paths
from ase.pathway.model import MullerBrown
from ase.pathway.projector import Mask
from ase.pathway.pathfinder import ADMD
from ase.pathway.gaussian import Gaussian, GaussianSearch
from ase.pathway.plotter import MullerBrownPlotter
P = 300
x = np.linspace(-0.55822365, 0.6234994, P)
y = np.linspace(1.44172582, 0.02803776, P)
p = np.array([[x], [y]])
hyperparameters = {'sigma_f': 1, 'sigma_n^f': 1e-8, 'sigma_n^e':1e-6,
'l^2': 0.1}
hyperparameters_bounds = {'sigma_f': (1, 1), 'sigma_n^f': (1e-8, 1e-6), 'sigma_n^e':(1e-6, 1e-4), 'l^2': (1e-4, 4)}
#Et='average'
#Et=-108.16672412
Et=-46.69951721 / 100
muE=1e-2
#label='/group1/schinavro/ThesisWork/Image2/auto_svg/data'
label='/group/schinavro/MullerBrown/test1/mb'
#dt = 1 / P
dt = 0.01
Et_opt_tol = 0.05
#dt = 0.002
maxiter=3000
gam= 0.3
#action_name=['classic', 'Energy conservation']
#action_name=['Onsager Machulup']
action_name=['Onsager Machulup', 'Energy conservation']
model = MullerBrown()
#model = Gaussian(real_model=model, hyperparameters=hyperparameters, hyperparameters_bounds=hyperparameters_bounds, mean_type='zero')
finder = ADMD(action_name=action_name, Et=Et, muE=muE, Et_type='manual', maxiter=maxiter, gam=gam)
#finder = GaussianSearch(real_finder=finder, phases=['auto et'], Et_opt_tol=Et_opt_tol)
auto_paths = Paths('H', p,label=label, database=label,
model=model,
finder=finder,
prj=Mask(reference=np.array([0, 0, 0]), dt=dt),
plotter=MullerBrownPlotter()
)
#auto_paths.finder._pbs='fifi'
[6]:
for i in range(4, 80, 5):
print(i)
4
9
14
19
24
29
34
39
44
49
54
59
64
69
74
79
[2]:
auto_paths.fluctuate(temperature=0.02)
[3]:
auto_paths.search()
Action name : ['Onsager Machulup', 'Energy conservation']
Target energy: -0.4669951721
Target type : manual
muE : 0.01
Warning: Desired error not necessarily achieved due to precision loss.
Current function value: 10731806.112699
Iterations: 41
Function evaluations: 133
Gradient evaluations: 121
Desired error not necessarily achieved due to precision loss.
Warning: Desired error not necessarily achieved due to precision loss.
Current function value: 3.054333
Iterations: 872
Function evaluations: 993
Gradient evaluations: 981
Desired error not necessarily achieved due to precision loss.
Warning: Desired error not necessarily achieved due to precision loss.
Current function value: 2.963323
Iterations: 66
Function evaluations: 118
Gradient evaluations: 106
Desired error not necessarily achieved due to precision loss.
Optimization terminated successfully.
Current function value: 2.962730
Iterations: 1
Function evaluations: 5
Gradient evaluations: 5
Optimization terminated successfully.
Gradient Error above tolerence!
Emergency mode; Run without gradient
It will take some time
Optimization terminated successfully.
Current function value: 2.899504
Iterations: 87
Function evaluations: 54418
Gradient evaluations: 91
Optimization terminated successfully.
Gradient Error above tolerence!
Emergency mode; Run without gradient
It will take some time
Optimization terminated successfully.
Current function value: 2.899500
Iterations: 0
Function evaluations: 598
Gradient evaluations: 1
[3]:
<ase.pathway.paths.Paths at 0x7fc7ab6d58d0>
[4]:
auto_paths.plot()
[76]:
#_ = auto_paths.add_data(index=[0, -1])
[2]:
#auto_paths.use_grad=False
while True:
auto_paths.finder.search(auto_paths)
if auto_paths.finder._res['nit'] < 3:
break
Action name : ['Onsager Machulup', 'Energy conservation']
Target energy: -0.4669951721
Target type : manual
muE : 0.01
Warning: Desired error not necessarily achieved due to precision loss.
Current function value: 2.969543
Iterations: 399
Function evaluations: 523
Gradient evaluations: 511
Desired error not necessarily achieved due to precision loss.
Action name : ['Onsager Machulup', 'Energy conservation']
Target energy: -0.4669951721
Target type : manual
muE : 0.01
Warning: Desired error not necessarily achieved due to precision loss.
Current function value: 2.966797
Iterations: 11
Function evaluations: 93
Gradient evaluations: 81
Desired error not necessarily achieved due to precision loss.
Action name : ['Onsager Machulup', 'Energy conservation']
Target energy: -0.4669951721
Target type : manual
muE : 0.01
Optimization terminated successfully.
Current function value: 2.966677
Iterations: 1
Function evaluations: 5
Gradient evaluations: 5
Optimization terminated successfully.
[3]:
auto_paths.plot()
[27]:
auto_paths.finder.use_grad=True
auto_paths.finder.check_grad(auto_paths, epsilon=1e-8)
10264147487.063562
[12]:
auto_paths.model.check_grad(auto_paths, epsilon=1e-8)
3.092468348168216e-05
[33]:
auto_paths.real_finder.use_grad=False
auto_paths.real_finder.search(auto_paths)
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
<ipython-input-33-0739bef37fa3> in <module>
----> 1 auto_paths.real_finder.use_grad=False
2 auto_paths.real_finder.search(auto_paths)
~/anaconda3/lib/python3.7/site-packages/ase/pathway/paths.py in __getattr__(self, key)
234 return self.__dict__['_prj'].__dict__[key]
235 else:
--> 236 raise AttributeError("Key called `%s` not exist" % key)
237
238 @ImageIndexing
AttributeError: Key called `real_finder` not exist
[4]:
auto_paths.get_velocity().shape
[4]:
(2, 1, 299)
[ ]: